Teams - Hack & Build 2024
This year, 12 teams participated in the hackathon, with a wide range of projects and ideas.

Team 1
A wheeled robotic dog named Blind that maps its environment using a camera and localization software.

Team 2
A fall detection robot that uses ultrasonic sensors to alert when someone falls.
Team 3
A wearable device that converts speech to Braille using vibrations.
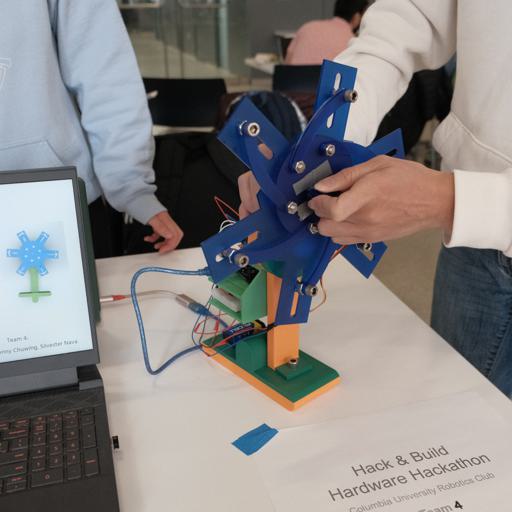
Team 4
A self-balancing reaction wheel that uses an expandable table mechanism for control.
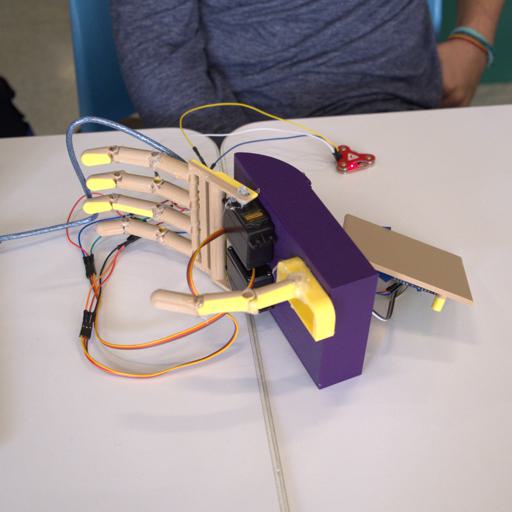
Team 5
A robotic hand that opens and closes based on muscle sensor input.
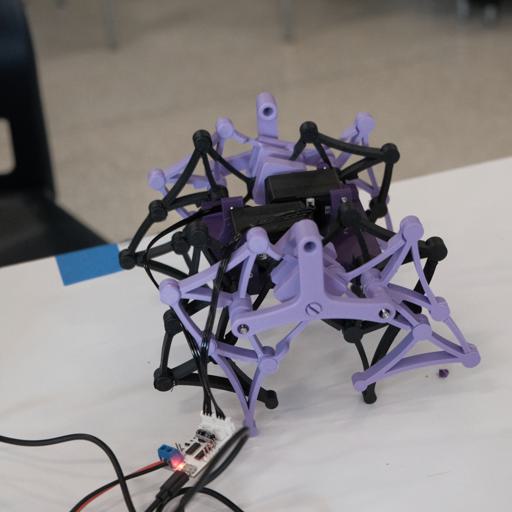
Team 6
A Strandbeest-style walking robot with fully 3D-printed joints and WASD controls.

Team 8
An eyeball robot that tracks people and syncs LED flashes to nearby music.
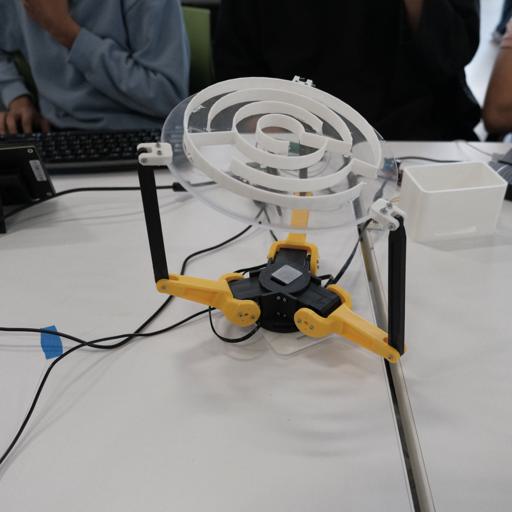
Team 9
A hand-controlled theremin with multiple sound modes using an ultrasonic sensor.
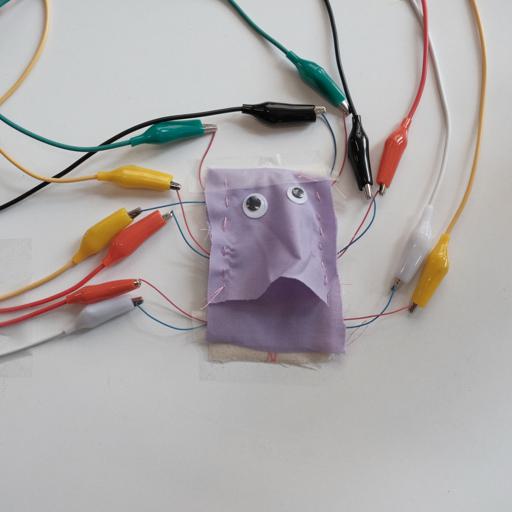
Team 10
A dancing tongue controlled by hand gestures and synced to music.
Team 11
A rotating 3D scanner that captures images to build digital models.
Team 12
A tilt-based maze solver controlled by a joystick and gyroscope.